干货分享丨Wire Bonding 打线邦定(引线键合技术,2023精华视频版)

1.Wire Bonding原理
a•IC封装中电路连接的三种方式:
b•倒装焊(Flip chip bonding)
c•载带自动焊(TAB---tape automated bonding)
d•引线键合(wire bonding)
Wire Bonding---引线键合技术
Wire Bonding的作用
电路连线,使芯片与封装基板或导线框架完成电路的连线,以发挥电子讯号传输的功能
Wire Bonding的分类
按工艺技术:
1•球形焊接(ball bonding)
2•楔形焊接 (wedge bonding)
按焊接原理:
|
1.热压焊 |
300-500℃ |
无超声 |
高压力 |
引线:Au |
|
2.超声焊 |
室温22~28 |
有超声 |
低压力 |
引线:Al、 Au |
|
3.热超声焊 |
100~150℃ |
有超声 |
低压力 |
引线:Au |
热超声焊的原理:
对金属丝和压焊点同时加热加超声波,接触面便产生塑性变形,并破坏了界面的氧化膜,使其活性化,通过接触面两金属之间的相互扩散而完成连接。
Wire Bonding的四要素:
•Time(时间)
•Power(功率)
•Force(压力)
•Temperature(温度)
2•Bonding用 Wire
Au WIRE 的主要特性:
•具有良好的导电性,仅次于银、铜。
电阻率(μΩ・cm)的比较
Ag(1.6)<Cu(1.7)<Au(2.3)<Al(2.7)
•具有较好的抗氧化性 。
•具有较好的延展性,便于线材的制作。常用Au
Wire直径为23μm,25 μm,30 μm
•具有对热压缩 Bonding最适合的硬度
•具有耐树脂 Mold的应力的机械强度
•成球性好(经电火花放电能形成大小一致的金球)
•高纯度(4N:99.99%)

3•Bonding用 Capillary
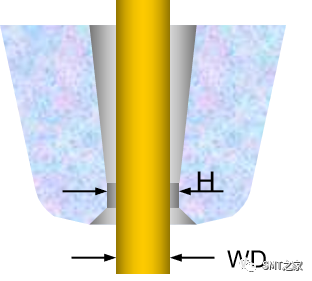
Capillary的选用:
Hole径(H)
Hole径是由规定的Wire径WD(Wire Diameter)来决定H=1.2~1.5WD
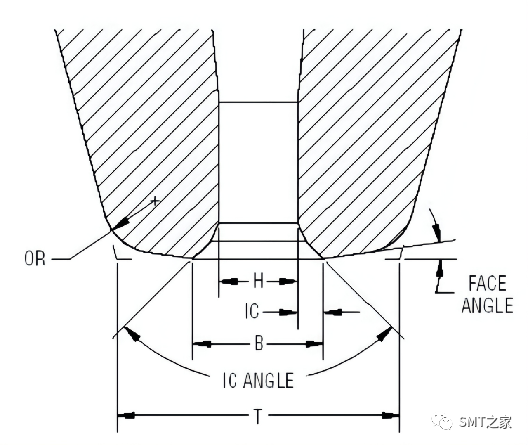
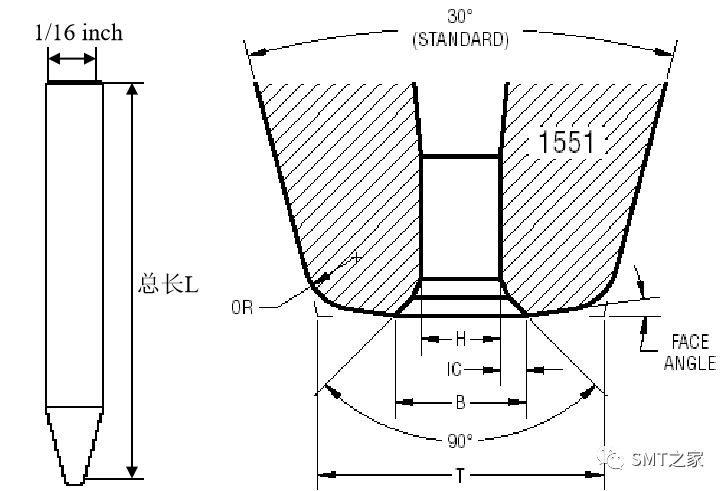
Capillary主要的尺寸:
H: Hole Diameter (Hole径)
T:Tip Diameter
B:Chamfer Diameter(orCD)
IC:Inside Chamfer
IC ANGLE:Inside Chamfer Angle
FA:Face Angle (Face角)
OR:Outside Radius
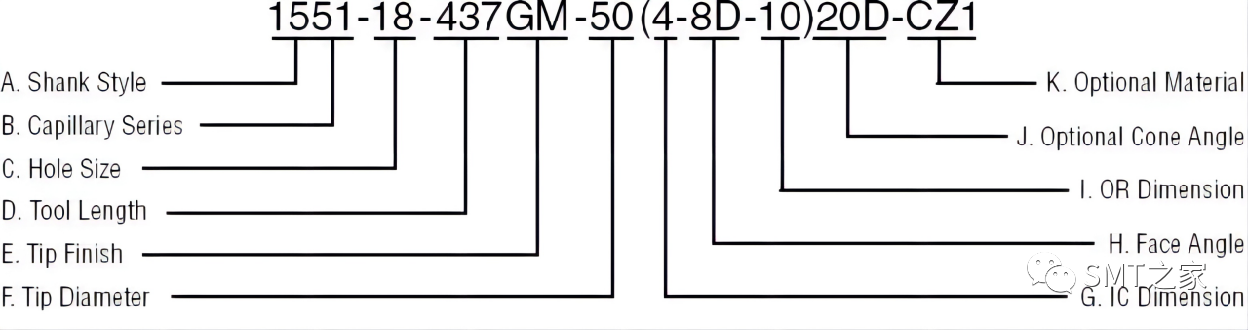
a 15(15XX):直径1/16 inch (约1.6mm),标准氧化铝陶瓷
b XX51:capillary产品系列号
c 18:Hole Size 直径为0.0018 in.(约46μm )
d 437:capillary 总长0.437 in.(约11.1mm)
e GM:capillary tip无抛光; (P:capillary tip有抛光)
f 50:capillary tip 直径T值为0.0050 in. (约127μm)
g 4: IC为0.0004 in. (约10μm)
h 8D:端面角度face angle为 8°
i 10:外端半径OR为0.0010 in.(约25μm)
j 20D:锥度角为20°
k CZ1:材质分类,分CZ1,CZ3,CZ8三种系列
Capillary尺寸对焊线质量的影响:
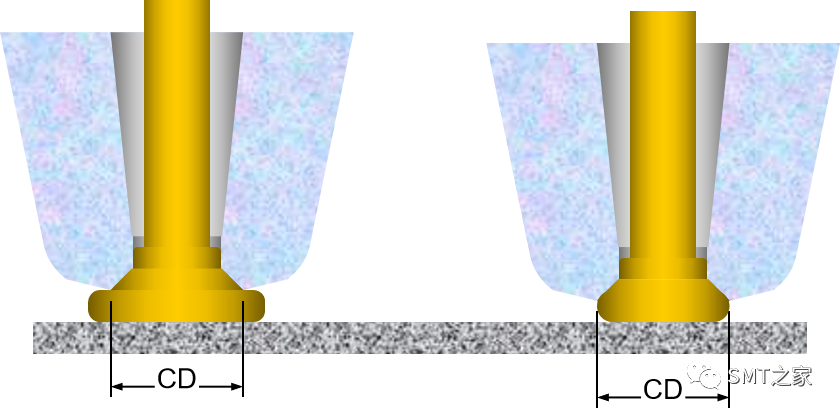
1• Chamfer径(CD)
Chamfer径过于大的话、Bonding强度越弱,易造成虚焊.
2• Chamfer角(ICA )
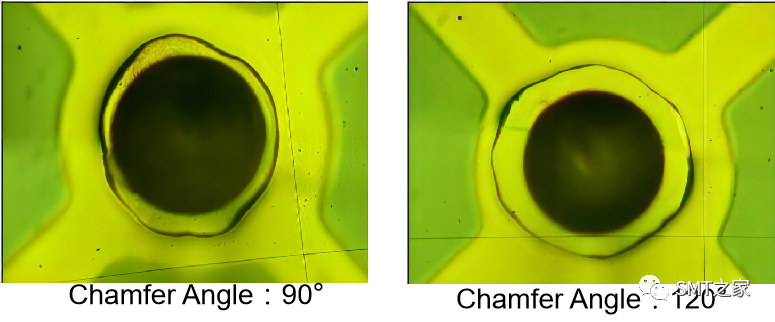
Chamfer角:小→Ball Size:小
Chamfer角:大→Ball Size:大
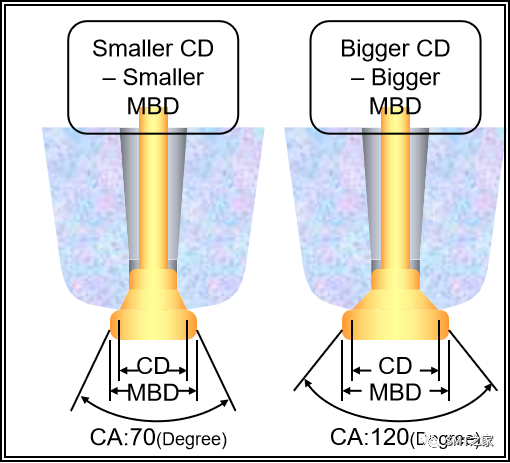
将Chamfer角由90°变更为120°可使Ball形状变大,随之Ball的宽度变宽、与Pad接合面积也能变宽。
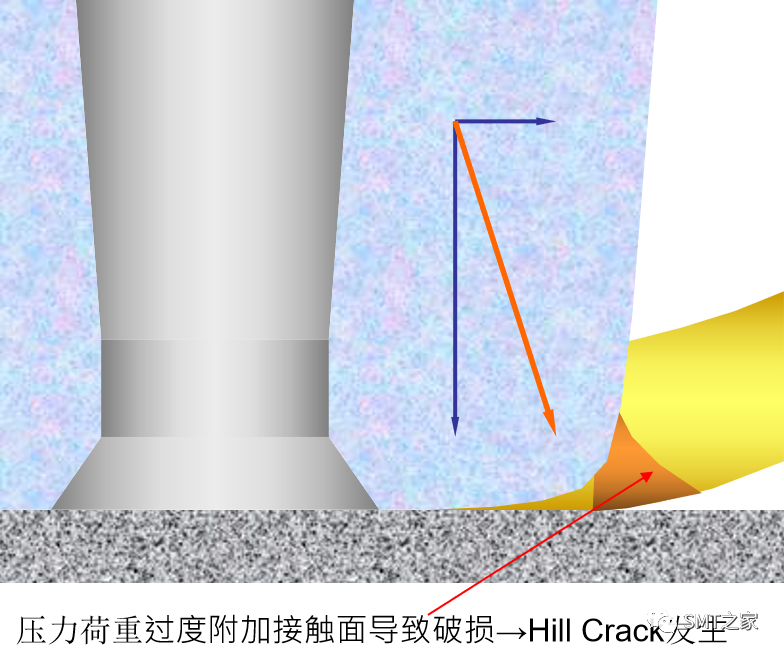
3• OR(Outer Radius)及FA(Face Angle):
对Hill Crack、Capillary的OR(Outer Radius)及FA(Face Angle)的数值是重要影响因素。

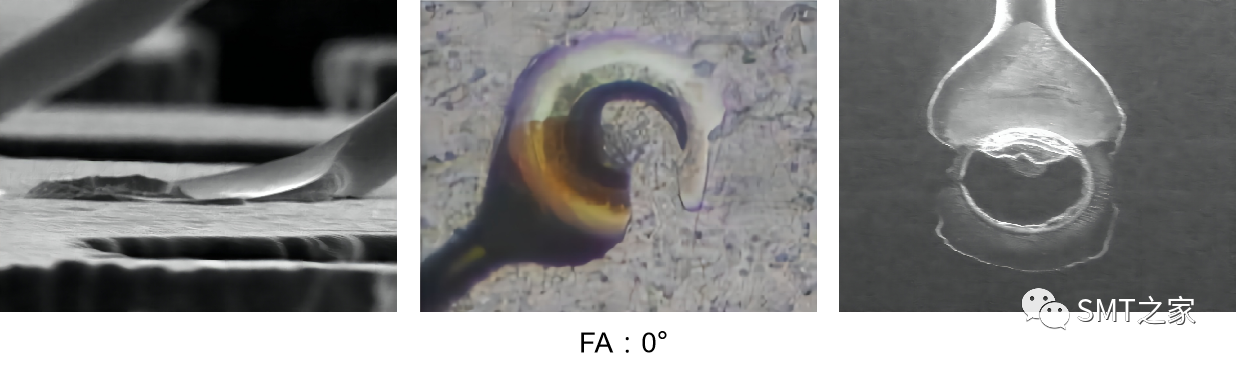
FA(Face Angle)0°→8°变更
FA 0°→8°的变更并未能增加Wire Pull的测试强度,但如下图所示,能够增加2nd Neck部的稳定性。

4• 焊接时间顺序图
|
次序 |
动作 |
|
1 |
焊头下降至第一焊点之搜索高度 |
|
2 |
第一焊点之搜索 |
|
3 |
第一焊点的接触阶段 |
|
4 |
第一焊点的焊接阶段 |
|
5 |
返回高度 |
|
6 |
返回距离 |
|
7 |
估计线长高度 |
|
8 |
搜索延迟 |
|
9 |
焊头下降至第二焊点之搜索高度 |
|
10 |
第二焊点之搜索 |
|
11 |
第二焊点的接触阶段 |
|
12 |
第二焊点的焊接阶段 |
|
13 |
线尾长度 |
|
14 |
焊头回到原始位置 |
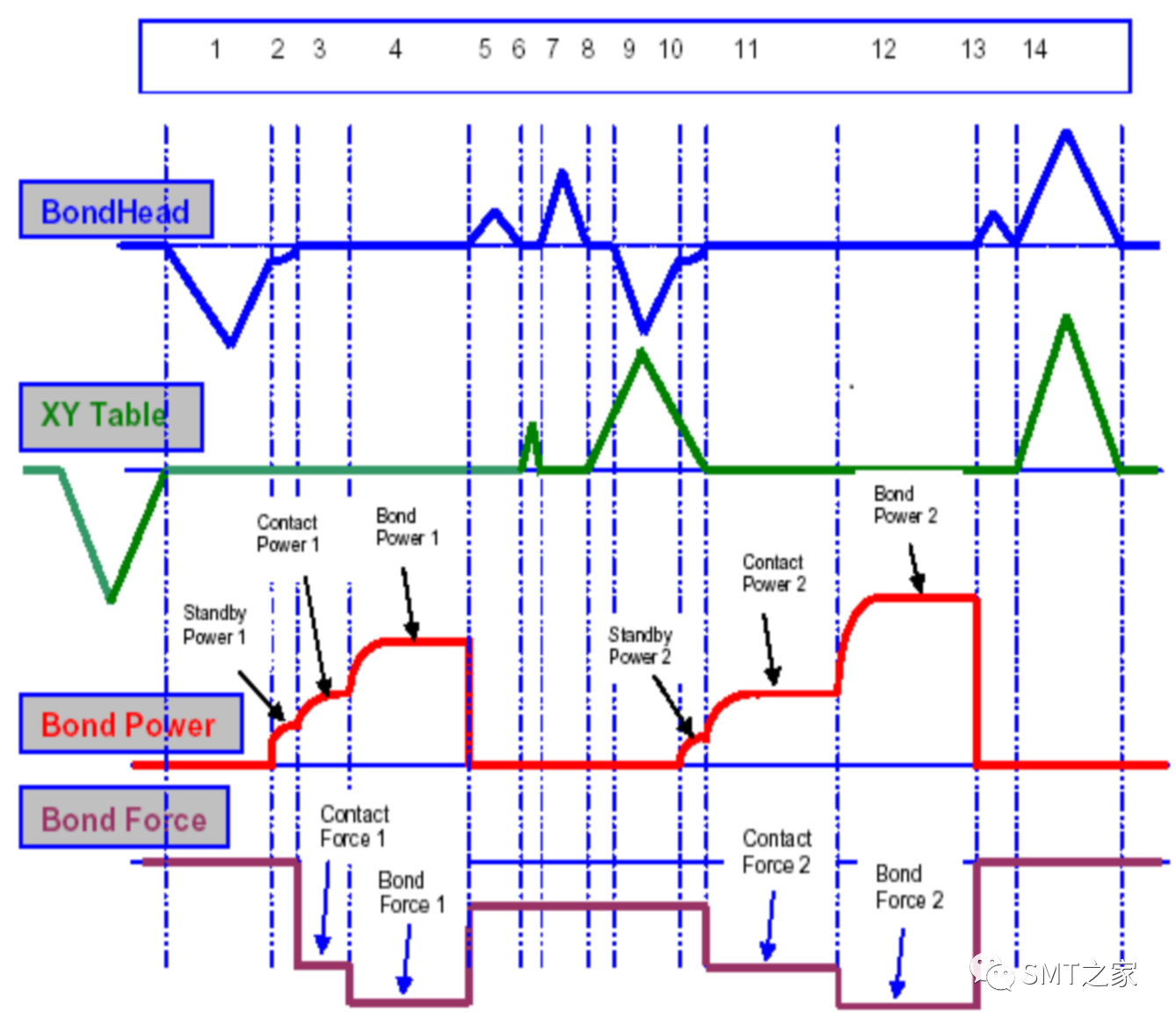
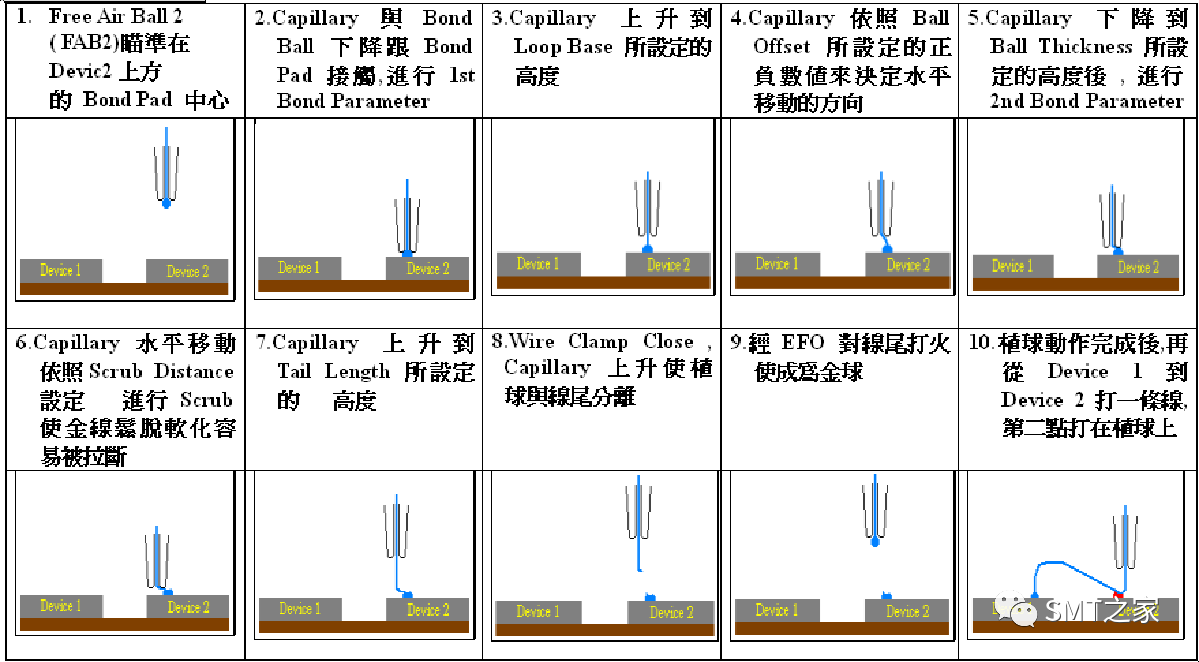
焊头动作步骤
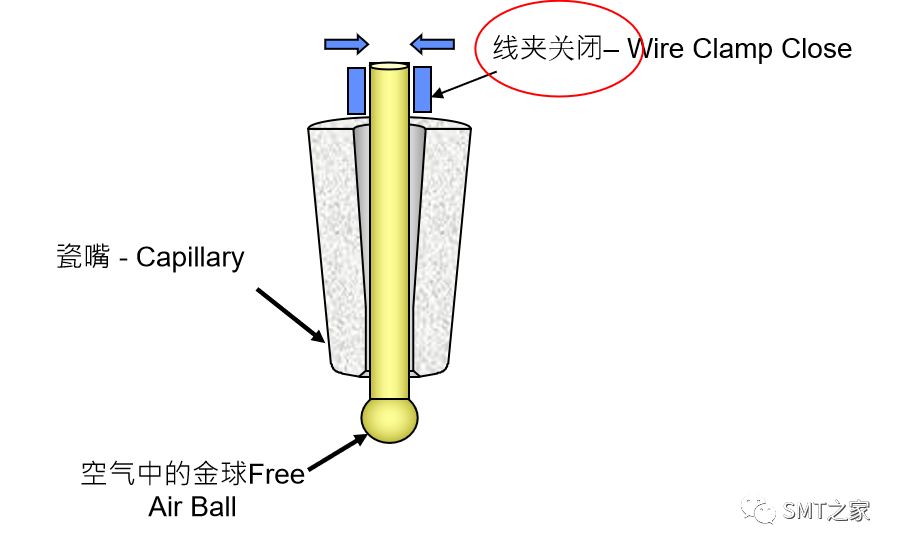
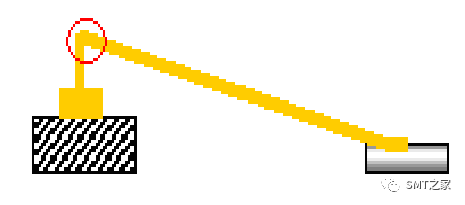
1• 焊头在打火高度( 复位位置 )
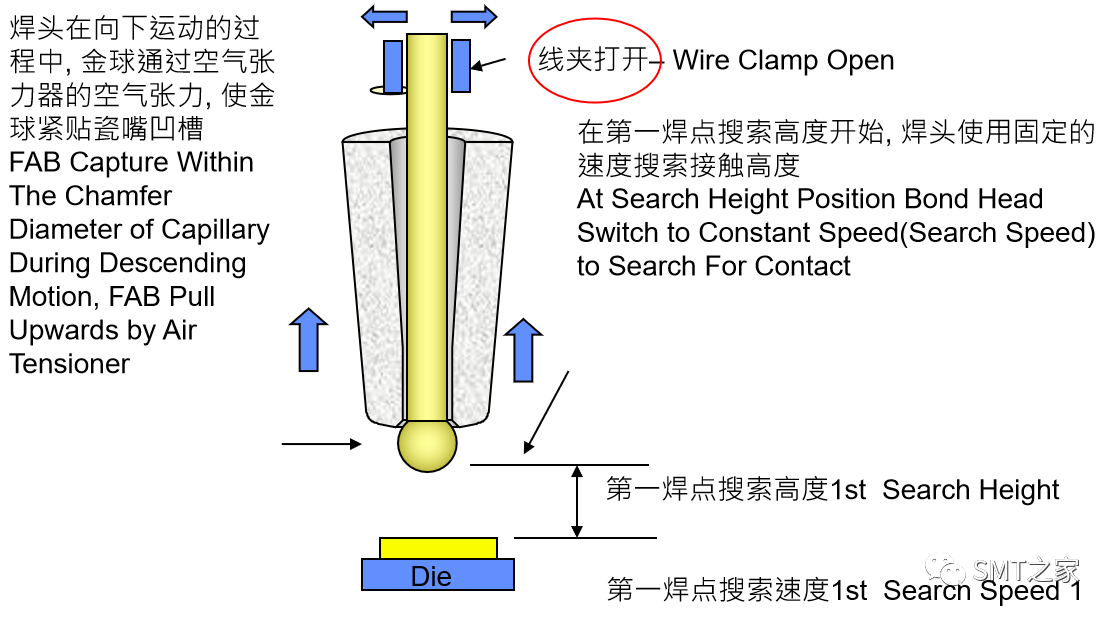
2• 焊头由打火高度下降到第一焊点搜索高度
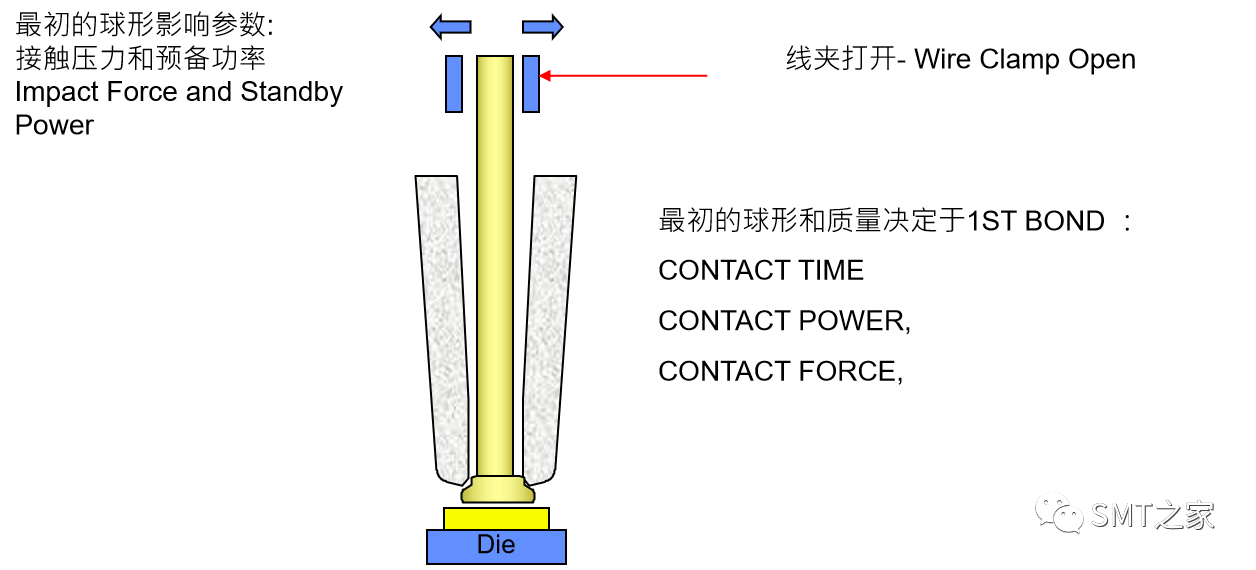
3• 第一焊点接触阶段
4• 第一焊点焊接阶段
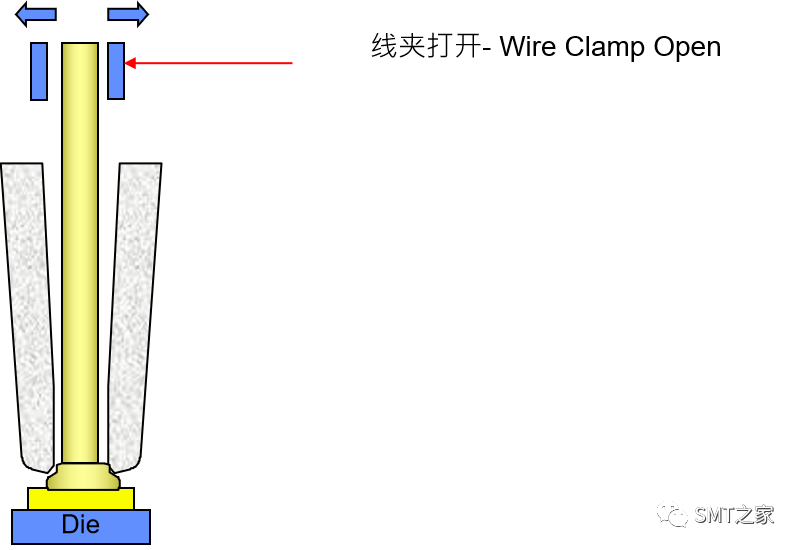
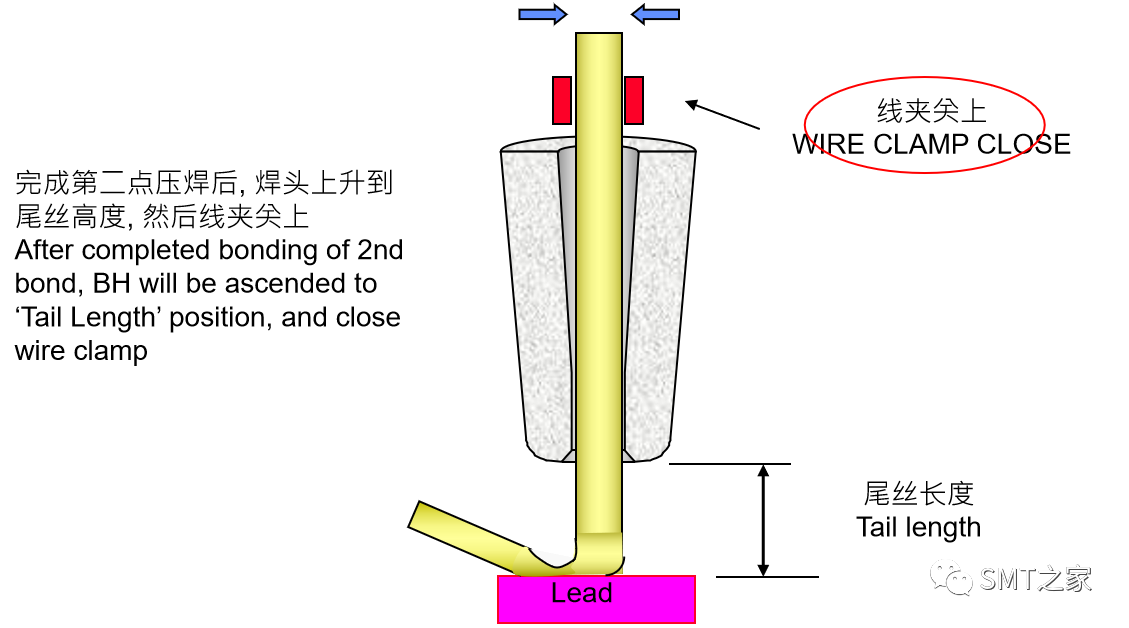
5• 完成第一点压焊后, 焊头上升到反向高度
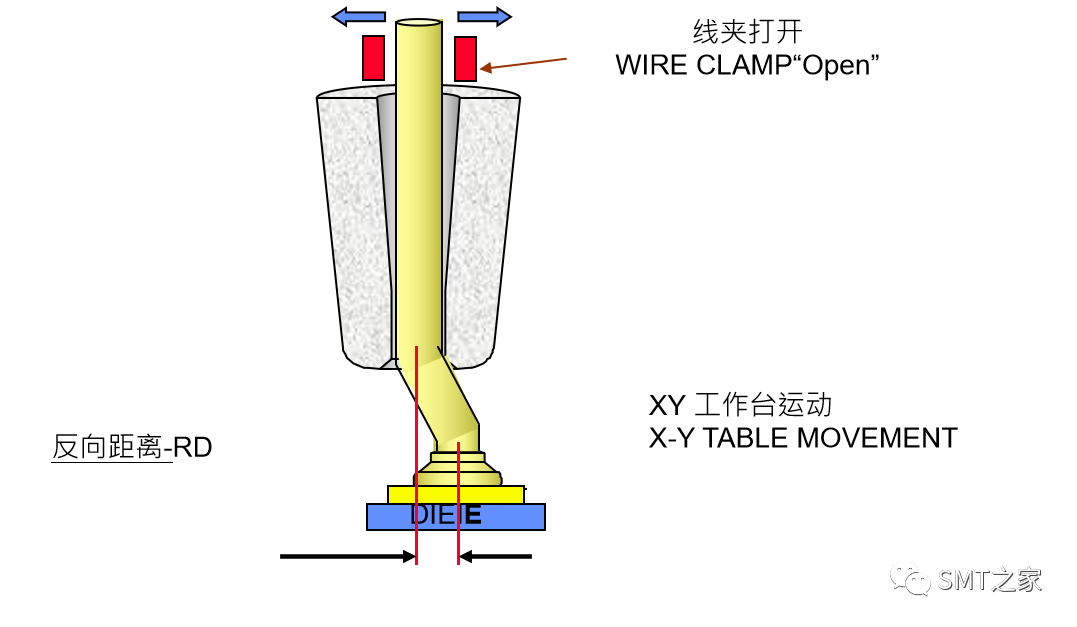
6• 反向距离
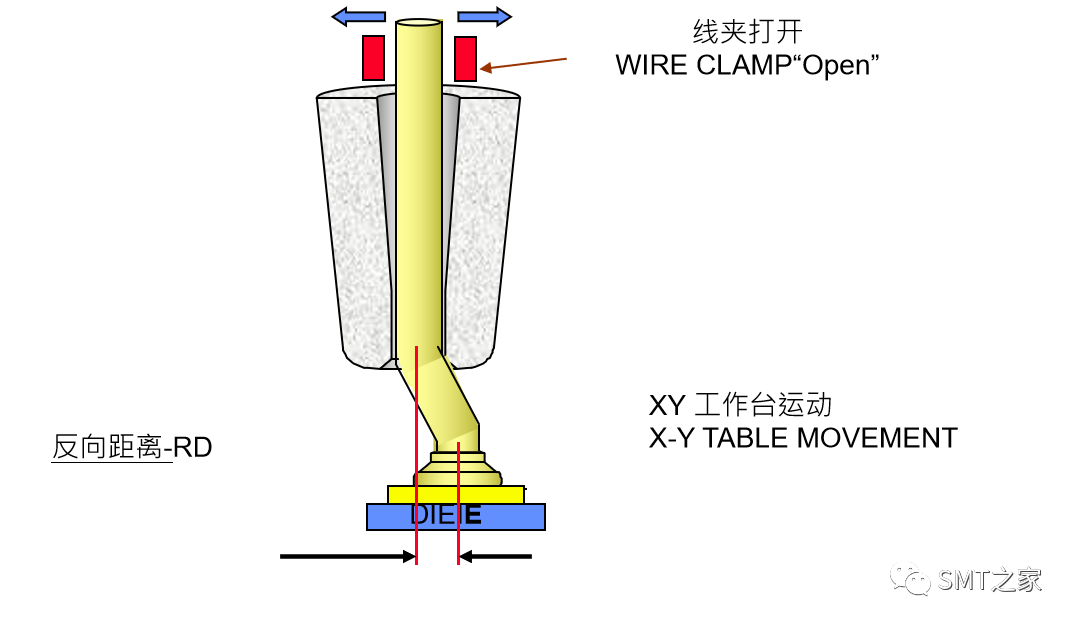
7• 焊头上升到线弧高度位置
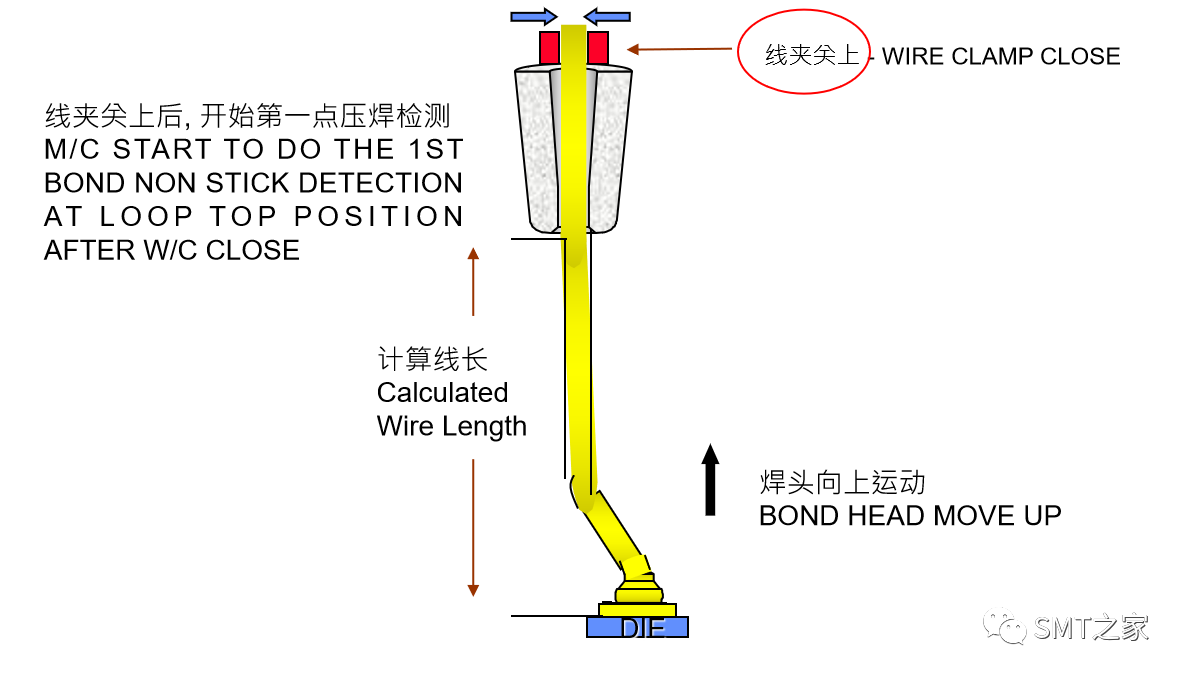
8• 搜索延迟
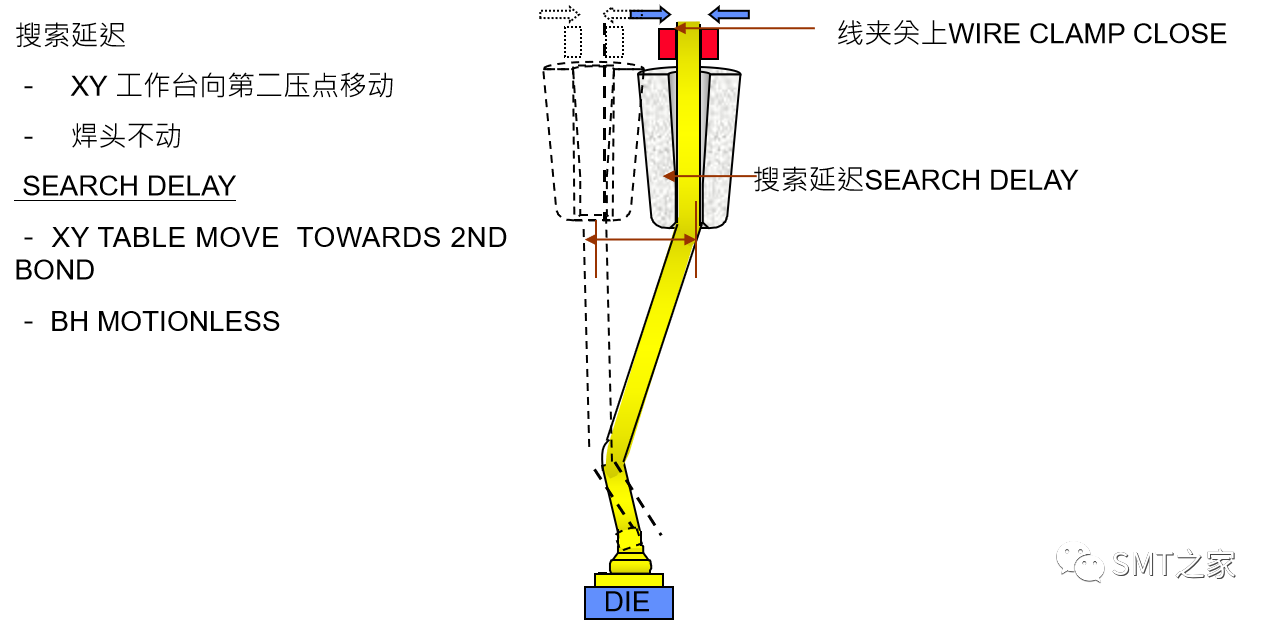
9• XYZ 移向第二压点搜索高度
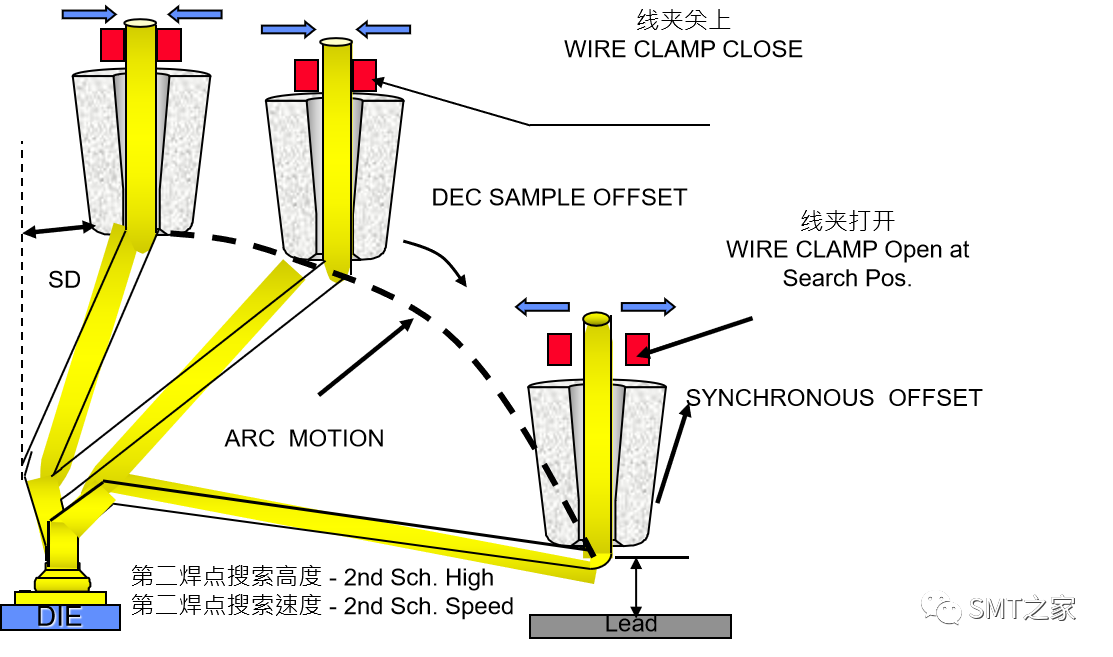
10• 第二焊点接触阶段
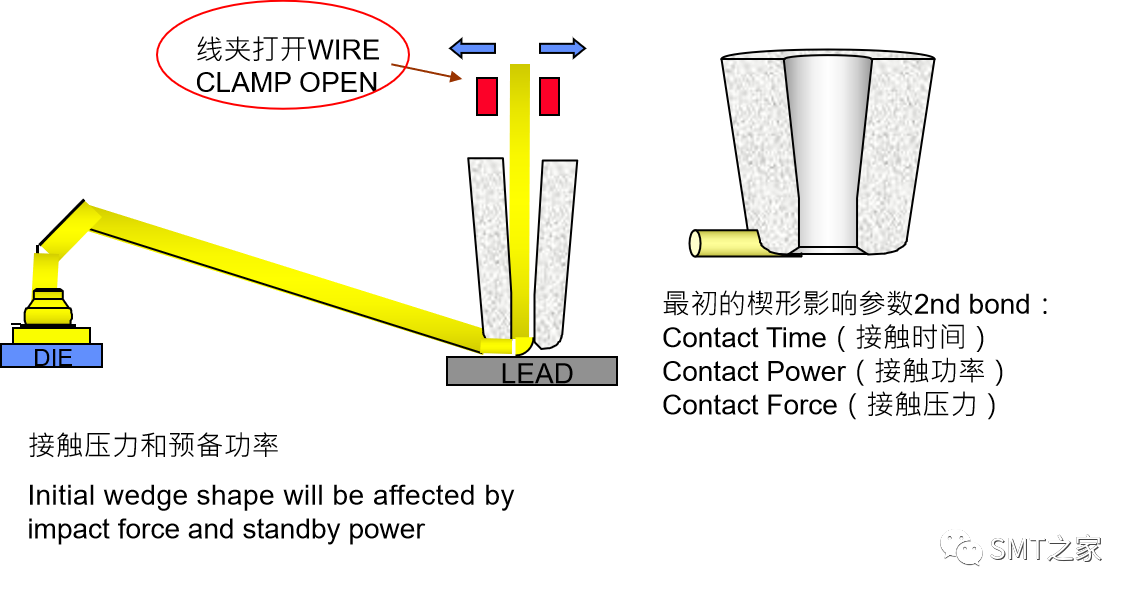
11• 第二压点焊接阶段
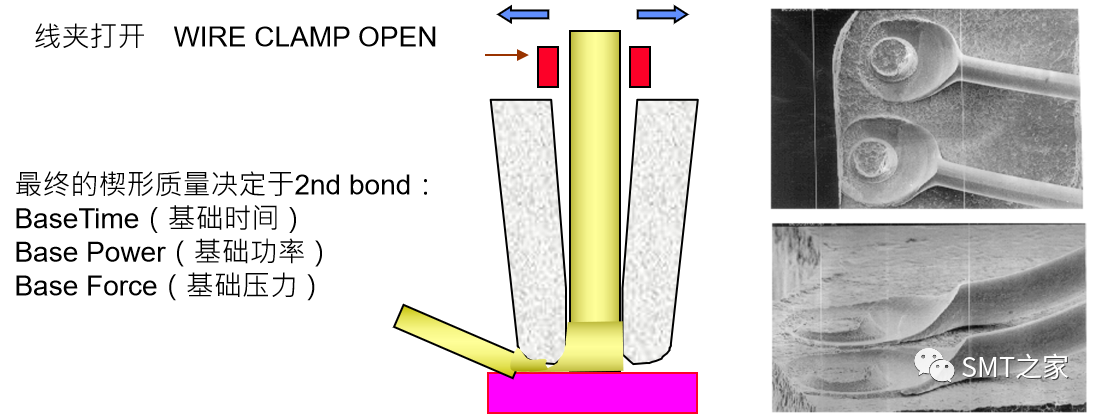
12• 焊头在尾丝高度
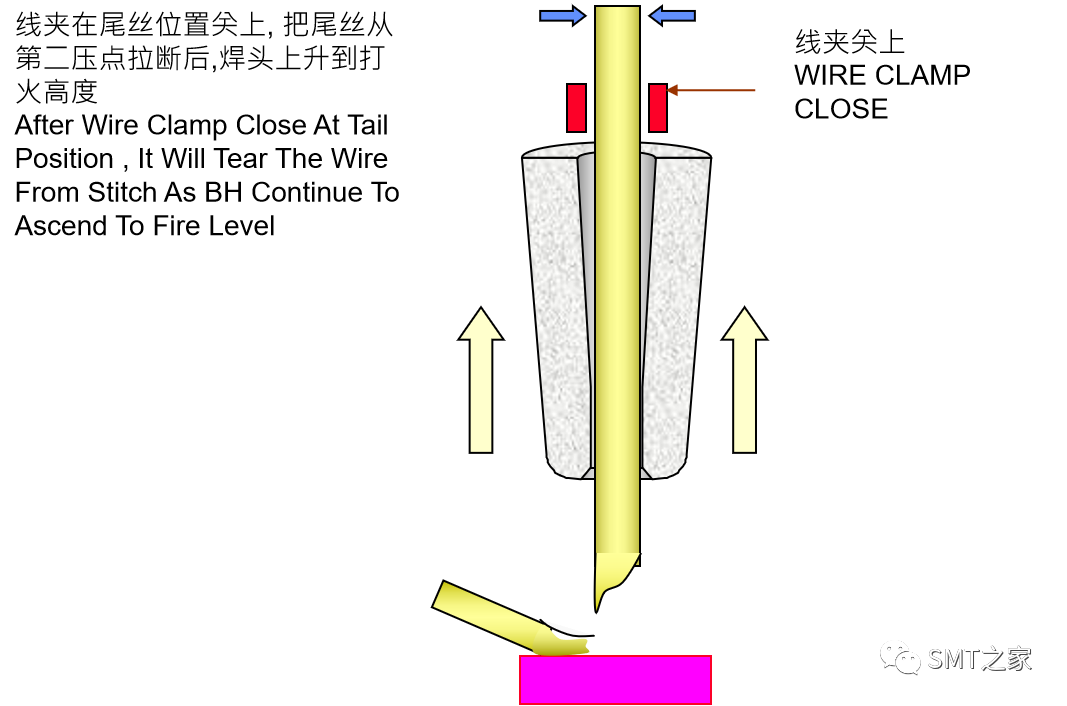
13• 拉断尾丝
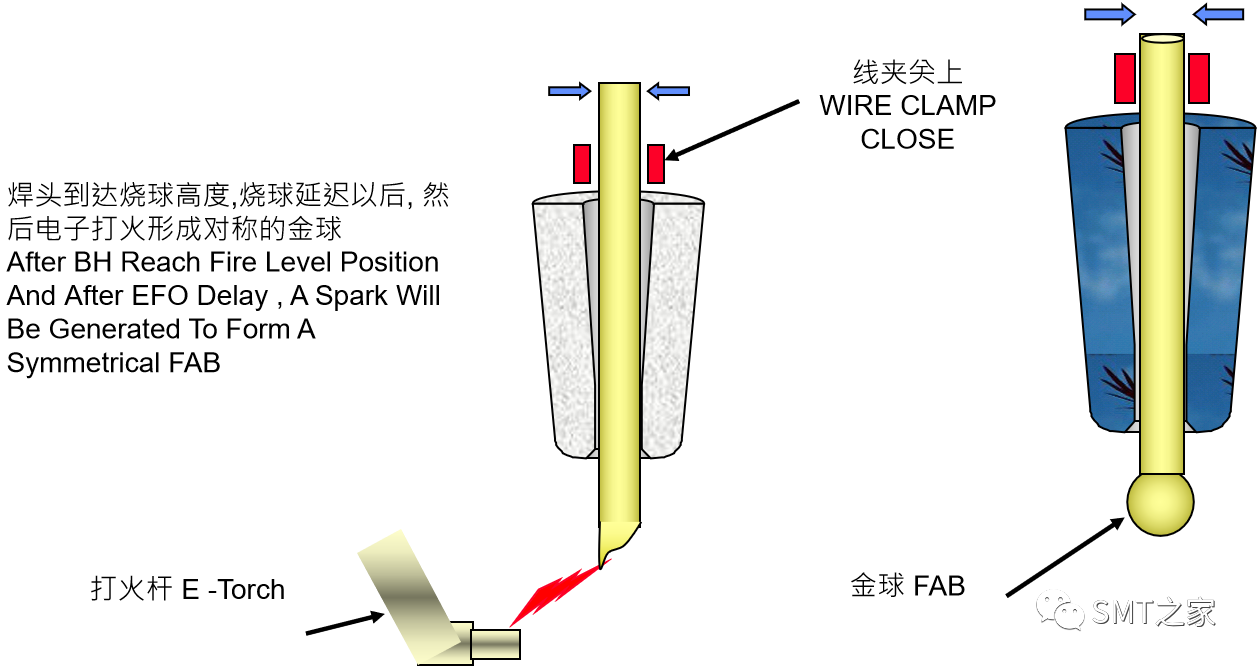
14•金球形成,开始下一个压焊过程
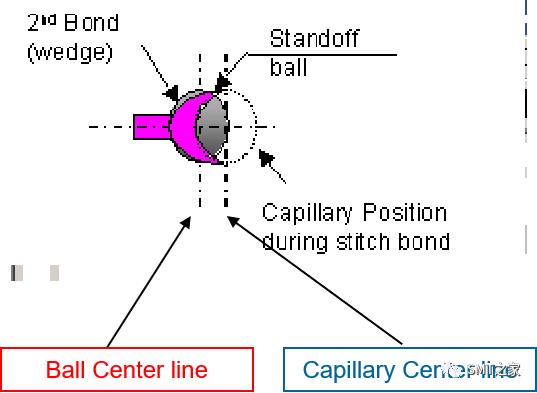
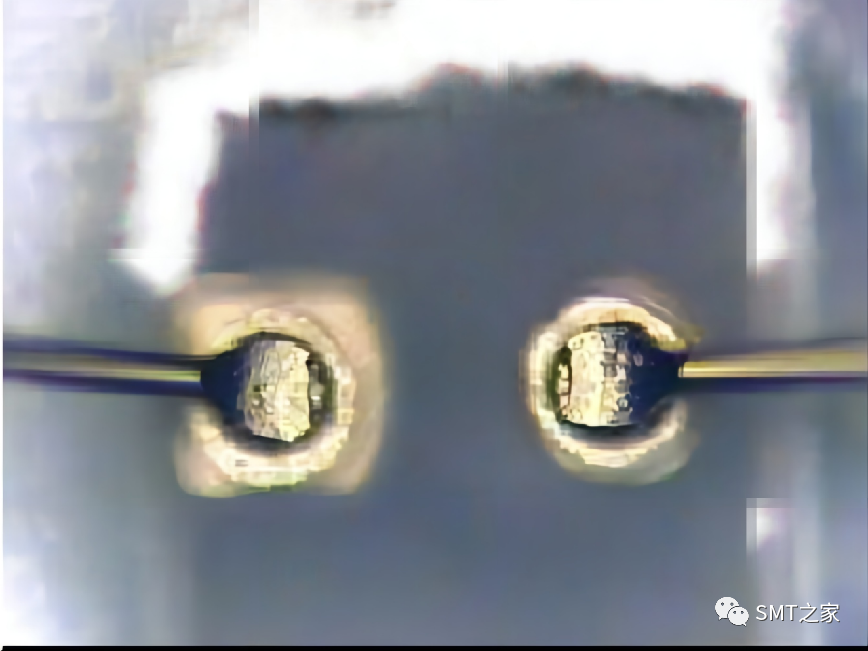
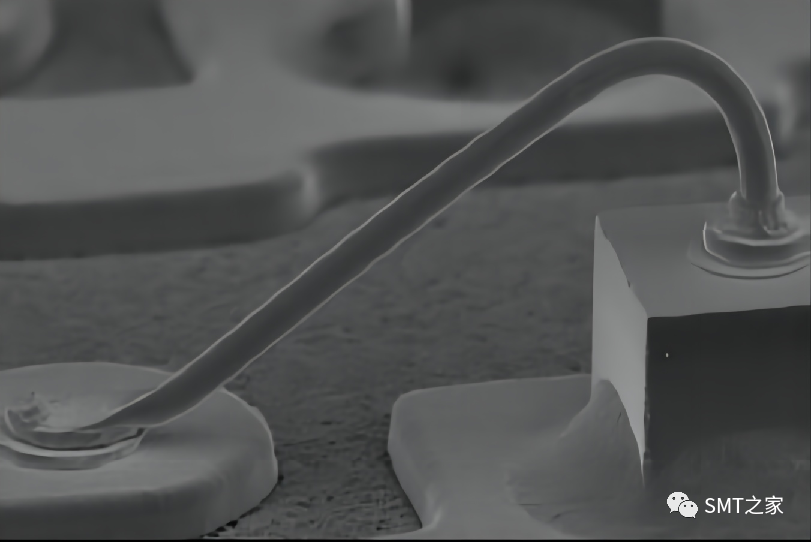
5.BSOB&BBOS

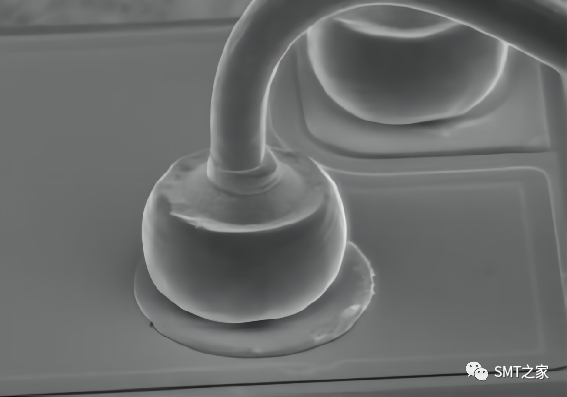
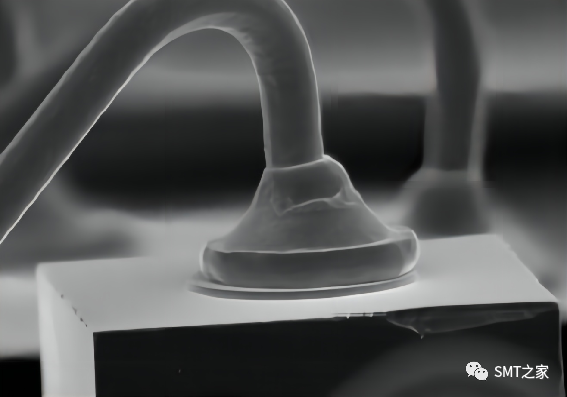
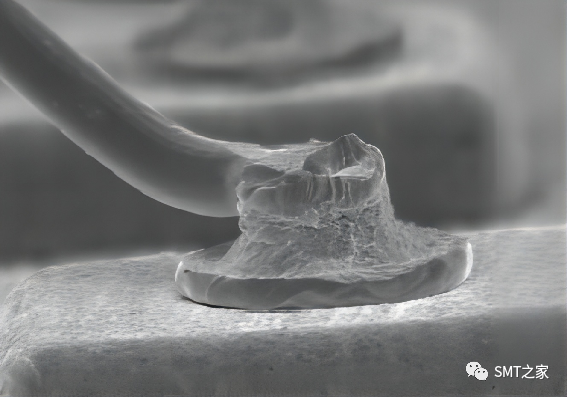
BSOB : BOND STICH ON BALL
BBOS : BOND BALL ON STICH
BSOB的应用:

BSOB 时BOND HEAD的动作步骤:
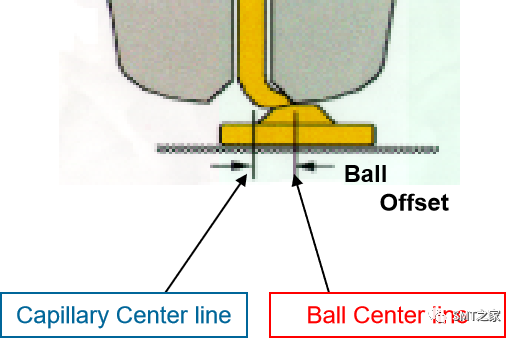
BSOB的两个重要参数:
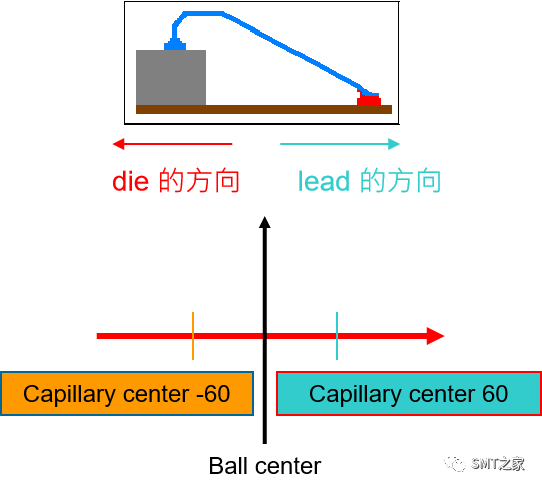
1• Ball Offset:设定范围: -8020, 一般设定: -60
此项设定植球时,当loop base 拉起后,capillary 要向何方向拉弧
设定值为正值 : 代表capillary 向lead 的方向拉弧
设定值为负值 : 代表capillary 向die 的方向拉弧
2• 2 nd Bond Pt Offset
此项是设定2銲点鱼尾在BALL上的偏移距离,
其单位是 x y Motor Step = 0.2 um ,一般设定:60
此参数主要目的以确保2銲点鱼尾与植球有最大的黏着面积
Wire Offset 0
Wire Offset 45
Wire Offset 55
Wire Offset 65

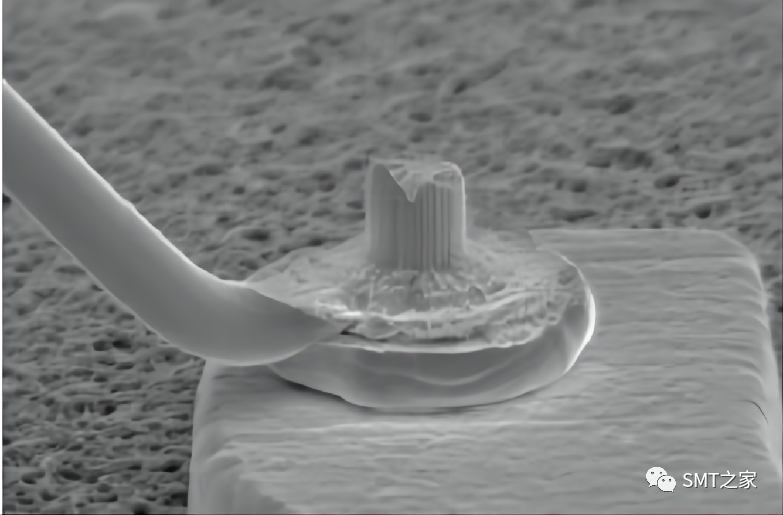
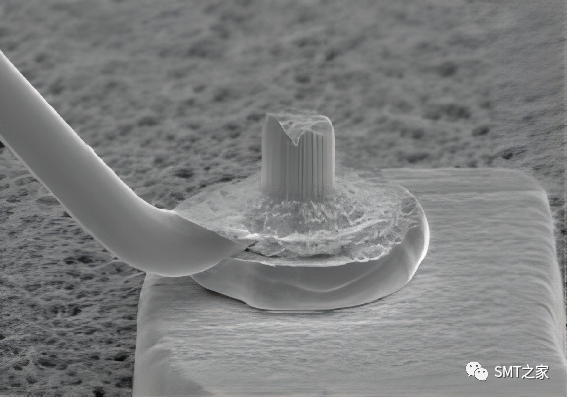
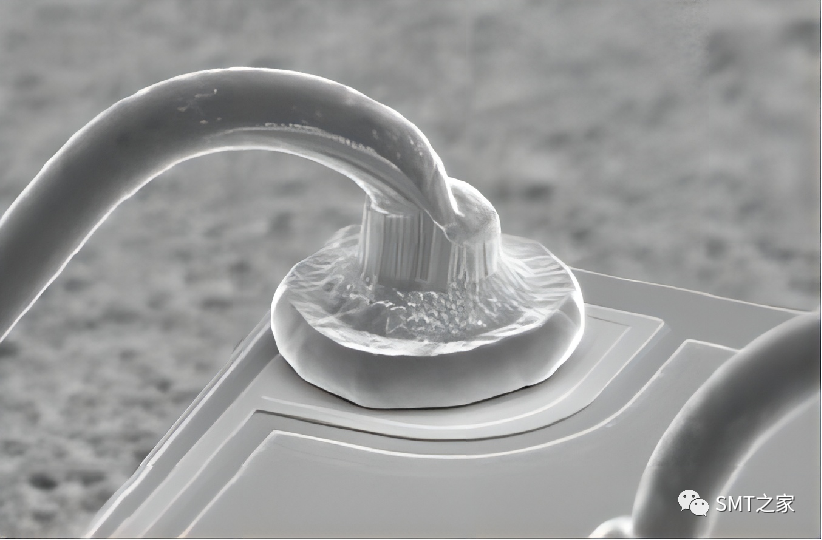
BSOB BALL
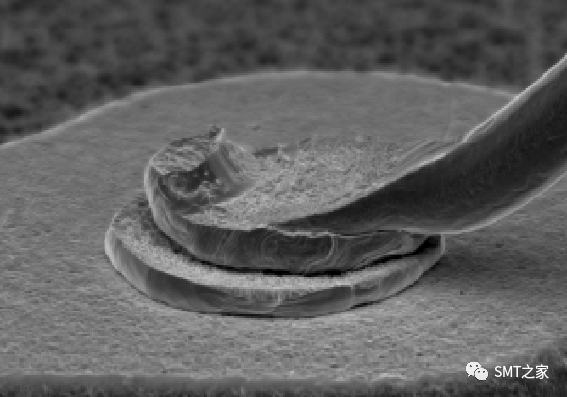
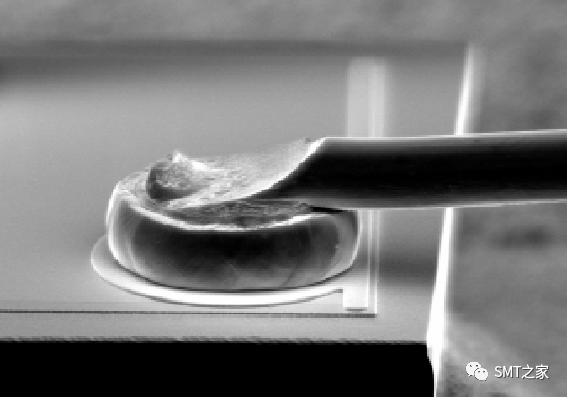
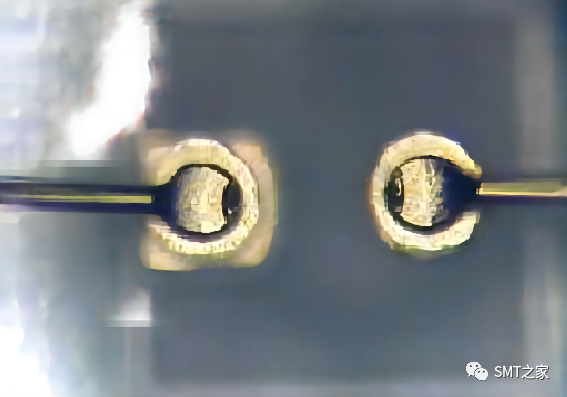
最佳BSOB效果
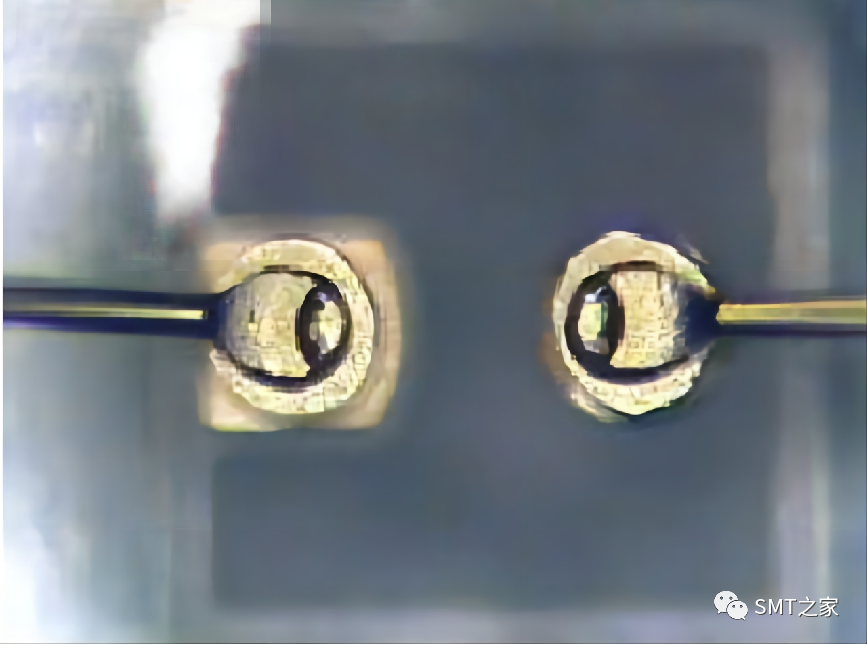
FAB过大,BASE参数过小
 BASE参数过大
BASE参数过大
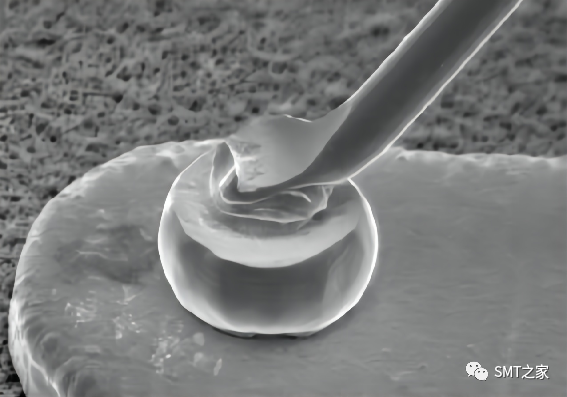
正常
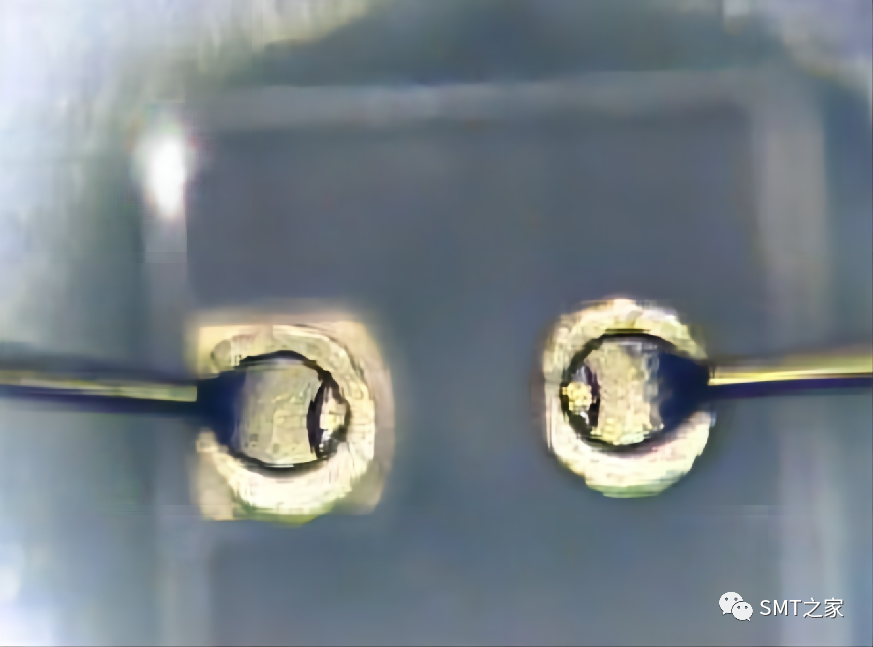
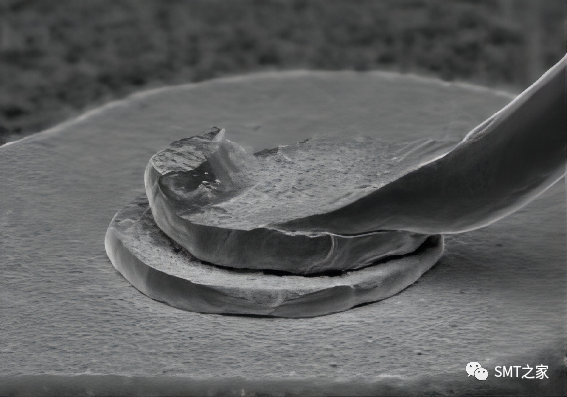
BALL过大,STICH BASE参数过小

BALL过小,STICH BASE参数过大
正常

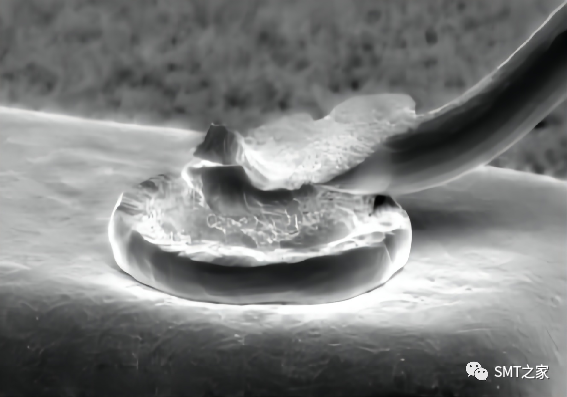
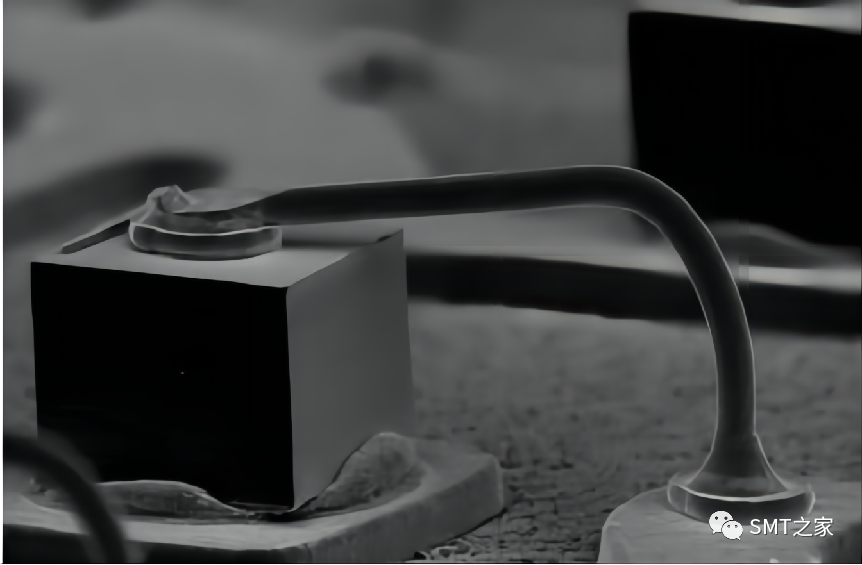
BSOB 2nd stich不良
6.Wire bonding loop
1. Q-Loop
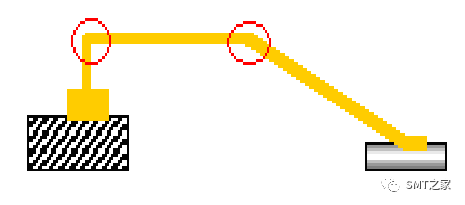
2. Square Loop
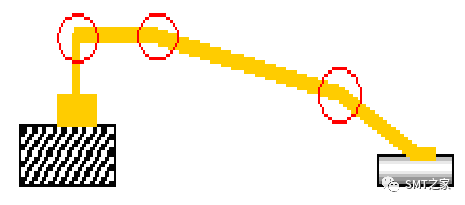
3. Penta loop
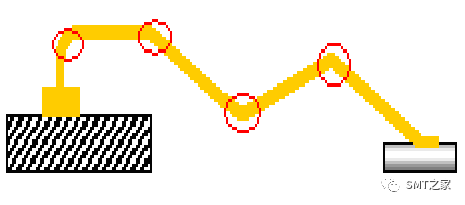
4. ‘M’ – loop
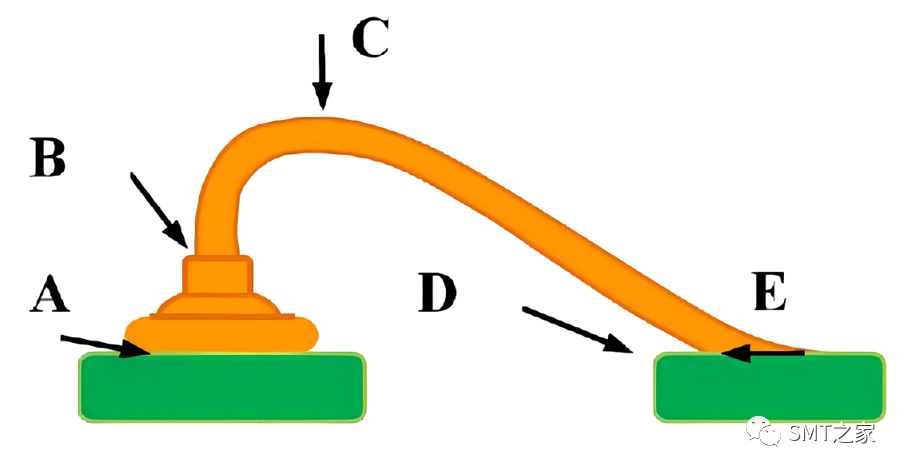
Q-LOOP轮廓及参数说明:
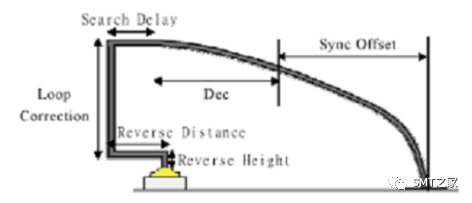

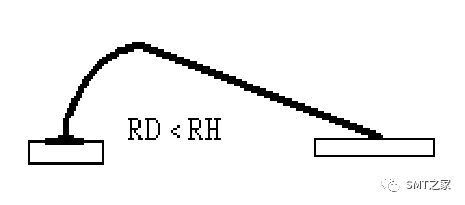
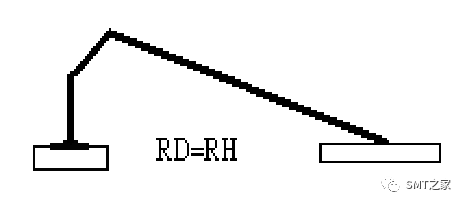
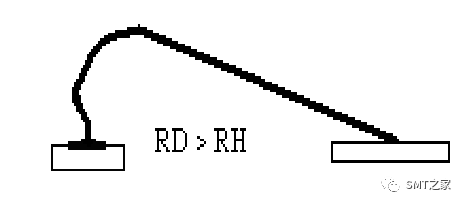
图1
图2
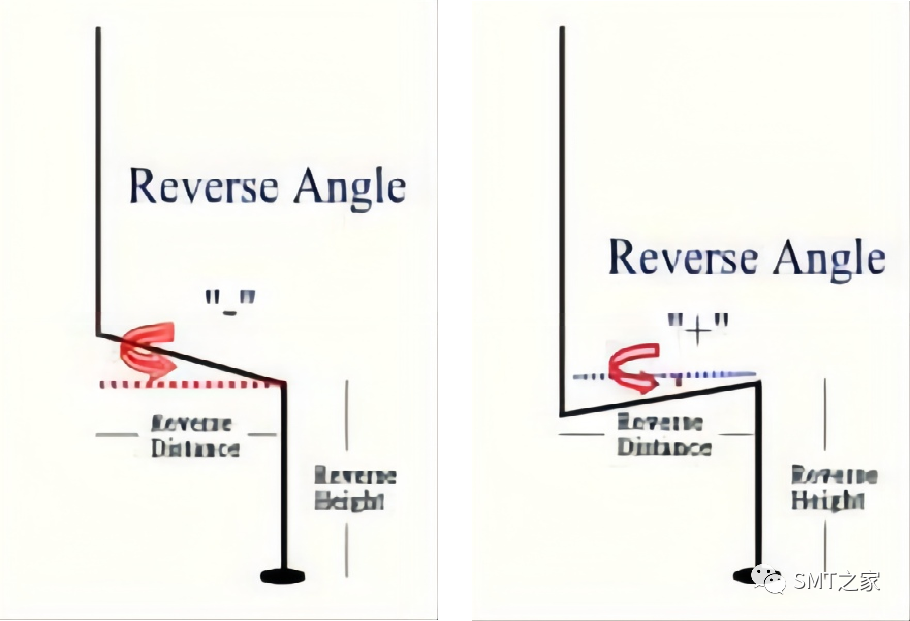
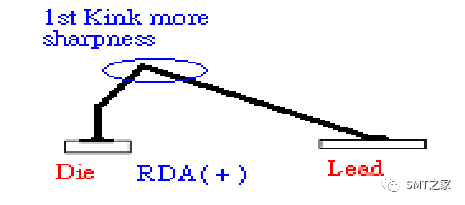
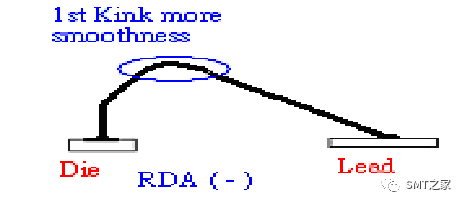
图3
Reverse Distance Angle 功能在定义Reverse Distance 方位
注意:假如反向拉弧的角度超过20度,可能会产生neck crack
好
不好
好

不好
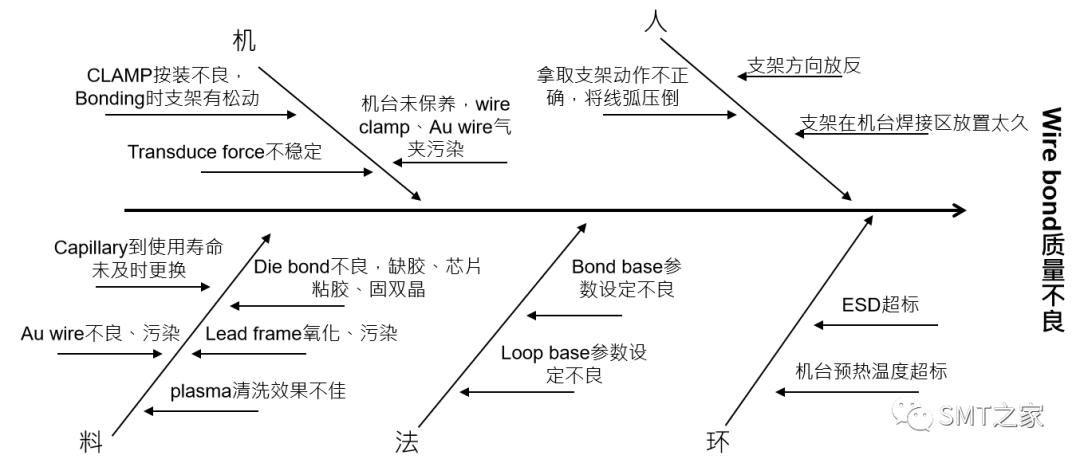
7.Wire bond不良分析